
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Článek k pochopení rozdílu mezi krokovými motory a servy a servomotory
I. Rozdíly mezi krokovými motory a servy a servomotory
Krokový motor: je elektrický impulsní signál do úhlového nebo liniového posunu částí krokového motoru s otevřenou smyčkou ovládacího prvku. Jednoduše řečeno, spoléhá na elektrický impulsní signál pro řízení úhlu a počtu otáček. Takže se spoléhá pouze na pulzní signál, aby určil, o kolik rotace. Protože zde není žádný senzor, může se úhel zastavení lišit. Přesný pulzní signál však odchylku minimalizuje.
Servomotor: spolehněte se na řídicí obvod servomotoru k ovládání rychlosti motoru, prostřednictvím snímače k ovládání polohy otáčení. Ovládání polohy je tedy velmi přesné. A rychlost otáčení je také variabilní.
Servo (Electronic Servo): Hlavní součástí serva je servomotor. Obsahuje řídicí obvod servomotoru + redukční převodovku. Ach jo, servomotor nemá redukční převodovku. A servo má redukční převodovku.
V případě limitního serva se spoléhá na potenciometr pod výstupní hřídelí pro určení úhlu natočení kormidla. Řízení signálu serva je pulsně šířkově modulovaný (PWM) signál, kde mikrokontrolér může tento signál snadno generovat.
II. Základní princip krokového motoru
Jak to funguje:
Normálně je rotor motoru permanentní magnet, a když proud protéká vinutím statoru, vinutí statoru vytváří vektorové magnetické pole. Toto magnetické pole uvede rotor do rotace o úhel, takže směr dvojice magnetických polí rotoru bude stejný jako směr magnetického pole statoru. Když se vektorové magnetické pole statoru otočí o úhel. Rotor se také otáčí o úhel s tímto magnetickým polem. Pro každý vstupní elektrický impuls se motor otočí o jeden úhlový krok vpřed. Jeho výstupní úhlové posunutí je úměrné počtu vstupních pulzů a jeho rychlost otáčení je úměrná frekvenci pulzů. Změnou pořadí, ve kterém jsou vinutí buzena, se motor otočí. Proto lze počet a frekvenci impulsů a pořadí buzení vinutí každé fáze motoru řídit pro řízení rotace krokového motoru.
Princip výroby tepla:
Obvykle vidět všechny druhy motorů, vnitřní jsou železné jádro a vinutí cívky. Odpor vinutí, výkon způsobí ztrátu, velikost ztráty a odpor a proud je úměrný čtverci, který je často označován jako ztráta mědi, pokud proud není standardní stejnosměrný nebo sinusový průběh, také způsobí harmonickou ztrátu; jádro má hysterezi efekt vířivých proudů, ve střídavém magnetickém poli bude také produkovat ztrátu, velikost materiálu, proud, frekvenci, napětí, což se nazývá ztráta železa. Ztráty mědi a železa se projeví ve formě vývinu tepla a tím ovlivní účinnost motoru. Krokový motor obecně sleduje přesnost polohování a točivý moment, účinnost je relativně nízká, proud je obecně větší a harmonické složky jsou vysoké, frekvence proudu se střídá s rychlostí a změnou, takže krokové motory mají obecně tepelnou situaci a situace je vážnější než obecný střídavý motor.
III. Konstrukce kormidla
Servo se skládá hlavně z pouzdra, desky plošných spojů, hnacího motoru, převodovky a prvku pro detekci polohy. Jeho pracovní princip spočívá v tom, že přijímač vyšle signál do serva a IC na desce plošných spojů pohání bezjádrový motor, aby se začal otáčet, a výkon je přenášen na otočné rameno přes redukční převod a zároveň detektor polohy posílá signál zpět, aby zjistil, zda dorazil do polohy nebo ne. Detektor polohy je vlastně proměnný odpor. Když se servo otáčí, hodnota odporu se odpovídajícím způsobem změní a úhel natočení lze zjistit detekcí hodnoty odporu. Obecný servomotor je tenký měděný drát omotaný kolem třípólového rotoru, když proud protéká cívkou, generuje magnetické pole a obvod magnetu rotoru vytváří odpuzování, které zase generuje rotační sílu. Podle fyziky je moment setrvačnosti předmětu přímo úměrný jeho hmotnosti, takže čím větší je hmotnost předmětu, který se má otáčet, tím větší je potřeba síla. Aby bylo dosaženo vysoké rychlosti otáčení a nízké spotřeby energie, je servo vyrobeno z tenkých měděných drátů stočených do velmi tenkého dutého válce, který tvoří velmi lehký dutý rotor bez pólů, a uvnitř válce, což je motor s dutou miskou, jsou umístěny magnety.
Aby vyhovovaly různým pracovním prostředím, existují serva s vodotěsným a prachotěsným provedením; a v reakci na různé požadavky na zatížení existují plastová a kovová ozubená kola pro serva a kovová ozubená kola pro serva jsou obecně vysoce točivá a vysokorychlostní, s výhodou, že se ozubená kola nebudou lámat v důsledku nadměrného zatížení. Serva vyšší třídy budou vybavena kuličkovými ložisky, aby byla rotace rychlejší a přesnější. Je rozdíl mezi jedním kuličkovým ložiskem a dvěma kuličkovými ložisky, samozřejmě dvě kuličková ložiska jsou lepší. Nová serva FET využívají hlavně FET (Field Effect Transistor), který má výhodu v nízkém vnitřním odporu, a tedy menší ztrátě proudu než normální tranzistory.
IV. Princip činnosti serva
Z vlny pwm do vnitřního obvodu pro generování předpětí, generátor stykače přes redukční převod pohání potenciometr do pohybu, takže když je rozdíl napětí nula, motor se zastaví, aby se dosáhlo účinku serva.
Protokoly pro servo PWM jsou všechny stejné, ale nejnovější serva, která se objeví, se mohou lišit.
Protokol je obecně: vysoká úroveň šířky v 0,5 ms ~ 2,5 ms pro ovládání otáčení serva v různých úhlech.
V. Jak fungují servomotory
Obrázek níže ukazuje řídicí obvod servomotoru vyrobený s výkonovým operačním zesilovačem LM675 a motor je stejnosměrný servomotor. Jak je patrné z obrázku, výkonový operační zesilovač LM675 je napájen 15V a napětí 15V je přidáno na sdružený vstup operačního zesilovače LM675 přes RP 1 a výstupní napětí LM675 je přidáno na vstup servomotoru. Motor je vybaven generátorem signálu měření rychlosti pro detekci rychlosti motoru v reálném čase. Ve skutečnosti je generátor signálu rychlosti druh generátoru a jeho výstupní napětí je úměrné rychlosti otáčení. Napěťový výstup z generátoru G signálu pro měření rychlosti je veden zpět na invertující vstup operačního zesilovače jako signál chyby rychlosti za obvodem děliče napětí. Hodnota napětí nastavená rychlostním povelovým potenciometrem RP1 se přičte k soufázovému vstupu operačního zesilovače po dělení napětí R1.R2, které je ekvivalentní referenčnímu napětí.
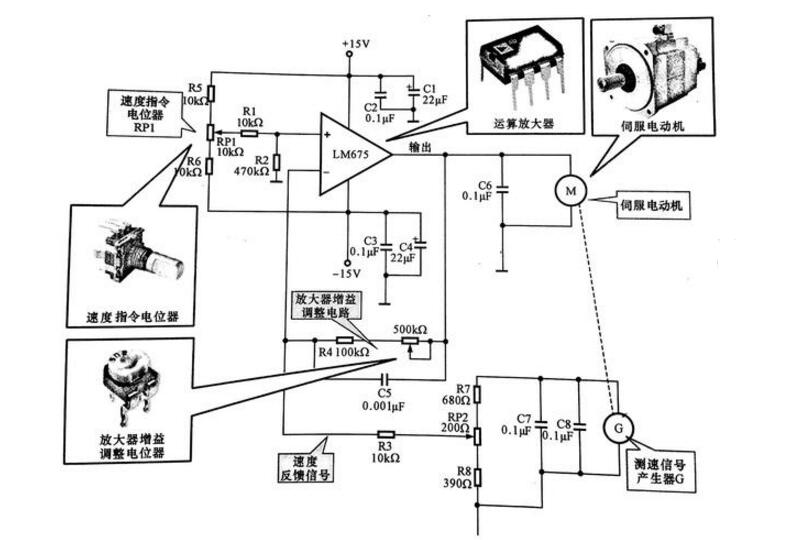
Schéma ovládání servomotoru
Servomotor: Označuje se písmenem M pro servomotor, je zdrojem energie pro pohonný systém. Operační zesilovač: označený názvem obvodu, tj. LM675, je část zesilovače v řídicím obvodu serva, která poskytuje hnací proud pro servomotor.
Potenciometr příkazu rychlosti RP1: Nastavuje referenční napětí operačního zesilovače v obvodu, tedy nastavení otáček. Potenciometr pro nastavení zesílení zesilovače RP2: Používá se v obvodu k jemnému doladění zesílení zesilovače a velikosti signálu zpětné vazby otáček.
Při změně zatížení motoru se mění i napětí přiváděné zpět na invertovaný vstup operačního zesilovače, to znamená, že při zvýšení zatížení motoru se otáčky snižují a výstupní napětí generátoru signálu otáček také klesá, takže napětí na invertovaném vstupu operačního zesilovače klesá a rozdíl mezi tímto napětím a referenčním napětím se zvyšuje a výstupní napětí operačního zesilovače se zvyšuje. Naopak, když se zátěž zmenšuje a otáčky motoru rostou, výstupní napětí generátoru signálu měření otáček stoupá, zpětné napětí přidané na invertovaný vstup operačního zesilovače se zvyšuje, rozdíl mezi tímto napětím a referenčním napětím se snižuje, výstupní napětí operačního zesilovače klesá a otáčky motoru se odpovídajícím způsobem snižují, takže rychlost otáčení může být automaticky stabilizována na nastavenou hodnotu.


